Транзистор в преобразователе. Часть 2
Транзистор в преобразователе. Часть 2: цепи управления
Статья продолжает тему практической разработки преобразователя и теперь речь пойдёт о цепях управления. Под цепями управления здесь подразумевается часть схемы непосредственно подключаемая к затвору силового транзистора. Что из себя представляет контроллер, алгоритмы управления, даже часть драйвера «по ту сторону» гальванической развязки, в данном контексте не важно. Задача статьи аналогично первой части – по возможности предостеречь, указать распространённые ошибки, возникающие ещё на этапе эскизного проектирования преобразователя.
Выбор драйвера
Если силовая часть начинается с выбора транзистора, то управление начинается с выбора драйвера. Драйвер, в свою очередь, обладает рядом критичных характеристик, на основании которых и должен осуществляться его выбор, и рядом характеристик на самом деле фактически не критичных. Далее, параметры драйвера можно разделить на три основные группы: конструктивные характеристики, параметры управления, выходные параметры. Первые две группы в контексте настоящей статьи не интересны, т.к. относятся к конструкции преобразователя и управляющей схеме. Так же не будет идти речь о защитах, т.к. защиты драйверы были достаточно описаны в статье «Драйвер IGBT в свете защиты транзистора». Рассмотрим подробнее именно выходные параметры, к которым относятся:
- выходные напряжения управления затвором;
- выходной импульсный ток;
- выходной средний ток (выходная мощность);
- выходные временные параметры: длительность фронтов управления и задержки включения/выключения (в т.ч. нестабильность задержки).
Последний параметр не являются собственно выходным, но на него необходимо будет обратить внимание.
Выходные напряжения управления в подавляющем большинстве случаев составляют +15 В на включении и -15…-5 В на выключении. Другое напряжение включения не встречается, а вот напряжение выключения может быть различным. У драйверов первых поколений «Semikron» -8…-7 В, у драйверов «CT Concept» («Power Integration») -10 В, у драйверов «Infineon», «In Power» -15 В. Такой разброс в напряжении выключения не должен смущать, т.к. на самом деле транзистору на запирании безразлично 0 В в затворе или -20 В, отрицательное напряжение необходимо для повышение помехоустойчивости управления, чтобы наведённый на выключении положительный импульс в затворе, а так же наведённое напряжение с других транзисторов инвертора на переключении, не достигли порогового напряжения и не открыли транзистор в неподходящее время. См. статью «Затворный резистор. Часть 1». В свою очередь, этот импульс напряжения крайне редко превышает амплитуду в несколько Вольт, тем более никак не более 10 В, поэтому смещения в -5 В уже достаточно для подавляющего большинства применений. Или с запасом -10 В, что на сегодняшний день является практически стандартом. Отрицательное напряжение меньшей амплитуды встречается разве что в драйверах малой мощности, а напряжение большей амплитуды избыточно и практического смысла не несёт. Напряжение -15 В, на самом деле, является хитростью производителей: повышая размах выходного напряжения можно на том же оконечном каскаде добиться существенно большего импульсного тока, который можно заявить в паспорте, а эта цифра способствует продажам. Но, что важно разработчику, в преобразователе ни на что не влияет. Влияет меньшая амплитуда: для преобразователей 12-го класса и выше, а так же для преобразователей любого класса, но на ток более 100 А, обязательно должно быть отрицательное напряжение запирания, хотя бы -5 В. Именно поэтому на этот параметр стоит обращать внимание, чтобы, например, не перепутать SKHI 21 (0 В на запирании, практически неприменимый драйвер) и SKHI 22 (-7 В, вполне подходящий драйвер) от «Semikron».
Выходной импульсный ток – один из наиболее критичных параметров. При этом критично его минимальное значение; избыточный импульсный ток (относительно расчётно необходимого) гасится затворным резистором и, потому, не принципиален. Необходимое значение импульсного тока определяется исходя из номинала затворного резистора (в частности, см. нижеприведённую информацию). Например, для управления транзистором выбран затворный резистор 5 Ом. Размах выходного напряжения составляет 25 В (от -10 В на выключении до +15 В на включении). Тогда необходимый импульсный ток драйвера должен быть не менее 25 В / 5 Ом = 5 А. Рекомендуется выходной импульсный ток драйвера не менее чем в 1,5 раза выше необходимого импульсного тока управления, т.к. если необходимый транзистору ток равен выходному току драйвера, то затворный резистор должен быть 0 Ом, а это нехорошо в плане согласования. Тогда для приведённого примера должен быть выбран драйвер с импульсным током не менее 7,5 А. В этом, собственно, заключается весь расчёт импульсного тока. Следует отметить, что на практике крайне редко встречаются затворные резисторы менее 2 Ом, даже для силовых транзисторов до 1000 А, а значит, за редчайшим исключением, достаточно драйвера с импульсным током 12…15 А, или, с запасом, – 20 А. Больший импульсный ток необходим для высокочастотных преобразователей (но здесь и большая средняя мощность, а это уже узкоспециализированные драйверы) или для транзисторов на ток в несколько кА. В то же время, последние поколения драйверов обладают импульсным током в 30…60 А, зачем? В сущности, обычный маркетинговый ход. Импульсный ток – один из основных параметров, чем он больше, тем (кажется потребителю) лучше драйвер, тем лучше он будет продаваться. И здесь производитель идёт на хитрости: увеличивает размах выходного напряжения (см. выше) или того интереснее: заявляется импульсный ток под 40 А, а в паспорте приписка, что эксплуатировать драйвер с затворным резистором менее 1 Ом запрещено (значит, реально ток никак не более 25 А), т.к. с меньшим затворным резистором будут неприемлемые сквозные токи в оконечном усилителе на MOSFET драйвера. Или импульсный ток 60 А (т.е. можно подключать транзисторы на много кА), но средняя мощность 1 Вт, на какой частоте можно эксплуатировать такую сборку драйвер-транзистор? Разве что в режиме одиночных импульсов. И прочие уловки. Проще говоря, большой импульсный ток (более 20 А) не должен являться критерием для разработчика, но иметь представление о минимальном импульсном токе, по вышеприведённому расчёту, необходимо.
Выходной средний ток – параметр не менее критичный импульсного тока. Более того, из практики, в большинстве случаев драйвер меняется именно по причине того, что он недостаточен по мощности для управления транзистором. Но эта характеристика не так «модна», как импульсный ток, а потому не настолько на слуху. В параметрах драйвера приводится либо средний выходной ток, либо выходная мощность. Зная размах выходного напряжения, одно легко переводится в другое. Мощность современных драйверов составляет 1…5 Вт на канал. Меньшая мощность встречается у маломощных многоканальных драйверов, большая мощность встречается ещё реже и больше характерна для высокочастотных драйверов. Например, 1SC2060 от «Power Integration»: до 500 кГц и до 20 Вт средней мощности, что, фактически, является рекордными значениями для серийных драйверов. Для подавляющего же большинства драйверов мощность 3+1 Вт – это типовое значение.
Для чего необходим этот параметр? Средняя мощность характеризует максимальную частоту, на которой может работать драйвер с данным транзистором. При этом мощность, необходимая транзистору для работу, рассчитывается следующей формулой:
P = Qgate x fin x ∆Vgate
Где P – потребляемая мощность, Qgate – суммарный заряд затвора, fin – рабочая частота, ∆Vgate – размах напряжений управления. Например, транзистор с зарядом затвора 5 мкКл, работает на частоте 10 кГц от драйвера с напряжениями +15 / -10 В, тогда:
Р = 5·10-6 х 10·103 х 25 = 1,25 Вт
Аналогично обратный расчёт. Если имеется драйвер, с выходной мощностью 3 Вт, максимальная частота 50 кГц, каким транзистором, в пределе, он может управлять?
Qgate = Р / (fin x ∆Vgate) = 3 / (50·103 х 25) = 2,4 мкКл
Это транзистор порядка 200 А / 1200 В.
Разумеется, желателен запас по мощности не менее 20%, оптимально – в 1,5 раза. И если на низких частотах этот параметр не столь критичен, то для относительно высокочастотных преобразователей (начиная от преобразователей индукционного нагрева) выходная мощность является едва ли ни основным критерием выбора драйвера.
Временные параметры драйвера с одной стороны критичны, с другой стороны на них можно вовсе не обращать внимания, по крайней мере при разработке типовых преобразователей. Т.к. силовой транзистор работает на частотах крайне редко более 50 кГц, а в подавляющем большинстве случаев до 20 кГц, при длительности импульса управления в ШИМ не менее 3…5 мкс, то задержки включения/выключения даже 1 мкс не критичны. Большее быстродействие драйвера физического смысла не несёт. Аналогично с рабочей частотой: норма для драйверов по частоте – это до 50 кГц, последние поколения – до 100 кГц. Драйверы с меньшей максимальной частотой, до 20…25 кГц, – это драйверы разработки прошлого века, например серии «М», «VLA» от «Powerex» («Mitsubishi») и на сегодняшний день такие драйверы используются относительно редко. Длительность фронтов управления в затворе даже для маломощных транзисторов составляет доли мкс (сотни нс) и обычно находится в диапазоне 1…5 мкс, т.е. и здесь плюс-минус сотни нс не критичны. Таким образом, временные параметры работы силового транзистора характеризуются мкс, в то время как даже худшие драйверы обладают временными характеристиками в сотни нс. Совершенно нет разницы, будет смещён выходной сигнал относительно входного на 50 нс или 0,5 мкс; нормируемая длительность фронта драйвера 20 нс или 0,2 мкс, всё равно фронты будут «завалены» до нескольких мкс. Ещё более показательно с дребезгом («jitter time»): дребезг задержки даже в сотни нс, не говоря о десятках нс, совершенно незаметен при работе преобразователя, т.к. фронты управления в этом преобразователе составляют несколько мкс и эти нс на таком фоне просто невозможно увидеть. Но как же производители? В последнем поколении «Power Integration» выдаёт «jitter time» едва ли ни как основной параметр, «Semikron» в ответ выпустил специальный драйвер с низким «jitter time» (до 2 нс) Skyper 42 LJR. Зачем? Даже временных характеристик драйверов первых поколений до сих пор более чем достаточно. За тем, что продукцию необходимо продвигать. Обычный маркетинг: «у нас задержки 50 нс, фронты по 10 нс, дребезг +2 нс… значит наш драйвер лучше». Конечно, иногда эти параметры важны: при последовательном включении транзисторов, при быстродействующих обратных связях и т.п. Но это сильно не типовые задачи, в контексте же типового применения на временные параметры современных драйверов можно, практически, не обращать внимания.
Выбор затворного резистора
О выборе затворного резистора уже говорилось в одной из предыдущих статей по теме преобразователей («Затворный резистор», части 1 и 2), а потому не будем описывать всё то же самое, а просто процитируем.
«…к выбору номинала этого резистора следует относиться со всей ответственностью. И здесь даже более критичен не слишком большой номинал, а наоборот – слишком малое сопротивление и, как следствие, слишком быстрая скорость переключения. Действительно, если сопротивление избыточно, его последствия наглядны и определяются довольно быстро: перегрев, большая длительность плато Миллера, сквозные токи из-за долгого выключения и малого «мёртвого» времени… Как правило, эти неисправности наглядны, позволяют себя обнаружить в процессе работы преобразователя и не приводят к хаотичным выходам из строя. Другое дело – слишком малое сопротивление. Самое неприятное при этом – кажущаяся спонтанность выходов из строя без видимых причин этих отказов. Импульсное перенапряжение на выключении может быть в норме, ограничено снабберными цепями, сквозных токов не наблюдается, сбоев тоже, но преобразователь выходит из строя. Причина не понятна. И здесь хорошо, если резистор слишком мал, тогда выход из строя «гарантированный», как правило на первом включении или первом же реверсе электродвигателя. Такой отказ проявляется ещё в лабораторных условиях у производителя и с ним ещё можно бороться. Хуже, когда резистор «маловат», тогда отказы появляются реже, становятся спонтанными и с причинами совсем становится не понятно. Преобразователь может пройти все испытания, перегрузочные режимы, а затем, через несколько месяцев, отказать у потребителя при прогоне на холостом ходу. При этом, зачастую, замена вышедшего из строя транзистора инвертора приводит к тому, что далее преобразователь работает исправно. Напрашивается причина – брак, какие-то скрытые дефекты, старение транзистора. На самом деле причина таких спонтанных отказов, почти всегда, либо в сбоях в драйвере, либо в заниженном сопротивлении затворного резистора».
Переходим к расчёту.
«Под сопротивлением затворного резистора подразумевается общее, суммарное выходное сопротивление цепей управления. В суммарное сопротивление входят:
1. Собственно сопротивление внешне устанавливаемого затворного резистора;
2. Сопротивление затворного резистора, встроенного в транзисторный модуль (встречается не всегда);
3. Выходное сопротивление драйвера.
Последнее легко рассчитать из импульсного тока драйвера и его выходных напряжений включения/выключения, а эта информация обязательно приводится в паспорте любого драйвера. Например, драйвер МД2180П-Б: выходное напряжение +15 В отпирающее, -10 В запирающее, импульсный ток не менее 18 А. Отсюда выходное сопротивление:
Rout = ∆U / Iimp = 25 / 18 = 1,4 Ом
Допустим, имеется транзисторный модуль со встроенным затворным резистором 2 Ом, тогда уже сопротивление цепи затвора составляет 3,4 Ом. И если в расчёте получается номинал 10 Ом, то должен быть установлен затворный резистор не 10 Ом, а 10 – 3,4 = 6,6 Ом».
Затворный резистор, помимо прочего, напрямую определяет длительность фронтов управления в затворе. Это важно отметить, т.к. в дальнейшем длительность фронтов управления на холостом ходу будет являться критерием правильного выбора резистора.
«…различные производители самых различных транзисторов, фактически, рекомендуют одни и те же длительности фронтов. Эти длительности неодинаковы для транзисторов различной мощности, но для транзисторов на близкие значения коммутируемых токов/напряжений почти совпадают. Но и для разных мощностей явно прослеживается зависимость: чем меньше требуется заряд затвора на переключение (что равносильно меньшей мощность, меньшему току коллектора), тем меньшие длительности фронтов допустимы. И наоборот: чем мощнее транзистор, тем более «затянутыми» должны быть фронты управления».
«Таким образом, т.к. современные транзисторы близки по параметрам, зависимости однозначны и одинаковы для всех производителей, а выбор затворного резистора позволяет большую погрешность (вплоть до +50%), то напрашиваются графики рекомендуемых, оптимальных значений (рисунки 1 и 2):
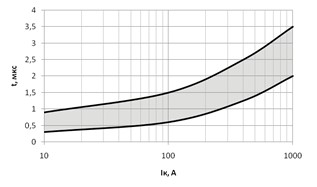
Рисунок 1 – Диапазон оптимальной длительности фронта
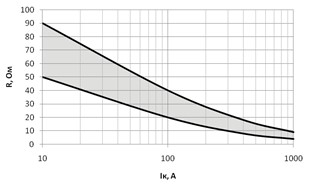
Рисунок 2 – Диапазон оптимального сопротивления резистора
Собственно в подборе оптимального сопротивления по графику 2 и проверки корректности расчёта по графику 1 и заключается весь предлагаемый метод.
Следует ещё раз уточнить значения, приведённые в графиках. На рисунке 1 (так же на рисунке 2) ток коллектор – максимальный постоянный ток транзистора при 100 0С. Для отечественных транзисторов эта величина указывается не всегда, но для ориентира её следует принимать за 0,6 + 0,1 от тока при 25 0С. Длительность фронта здесь – время между 10% и 90% (или +10 В на включении) напряжения управления в затворе при отсутствующем напряжении коллектор-эмиттер. На рисунке 2 указанное сопротивление – это суммарное сопротивление цепей управления.
Приведём пример расчёта для транзистора IRGPC60B120KD:
Ток коллектора 60 А, тогда из графика рисунка 2 следует, что сопротивление цепи затвора должно составлять 25…50 Ом.
Встроенный в транзистор затворный резистор отсутствует.
Допустим для управления используется драйвер собственной разработки с оконечным каскадом на одиночной комплементарной паре КТ665 / КТ664 при питании +15 В / -5 В. Такой драйвер выдаёт около 3 А импульсного тока.
Тогда Rg = Rрасч - RDR - RVT = (25…50) - (20 / 3) - 0 = 18…43 Ом
Таким образом, оптимальное сопротивление затворного резистора должно быть 30 Ом, при этом, после установки и измерения при помощи осциллографа, длительность фронтов должна составлять 1 + 0,3 мкс.
Как следует из графиков рисунков 1 и 2 оптимальные значения сопротивления зависят от тока транзистора и его суммарного заряда затвора; нет зависимости от типа транзистора (MOSFET или IGBT) и его пикового, пробивного напряжения. На самом деле графики, без поправок, подходят для IGBT на 1200 В и для MOSFET на 200 В, т.к. их характеристики цепи затвора очень схожи. При большем или меньшем напряжении графики так же подходят, но необходима поправка: сопротивление резистора должно быть увеличено (до типового значения по верхней границе выделенных на графиках областей) при снижении напряжения до 100 В для MOSFET и 600 В для IGBT. И сопротивление резистора должно быть уменьшено для 250 В MOSFET и 1700 В IGBT».
Подключение цепи затвора
Драйвер выбран, сопротивление резистора подобрано, осталось подключить драйвер к транзистору. Схемотехнически здесь имеются всего два элемента: разрядный резистор и ограничитель. Иногда устанавливаются цепи защиты от перенапряжения коллектор-эмиттер, «active clamping», между затвором и коллектором (см. статью «Драйвер в свете защиты транзистора»). Так же ставят диоды Шоттки между затвором и цепью положительного напряжения питания драйвера (импульс перенапряжения затвора в такой схеме «уходит» в выходные конденсаторы драйвера). Применяются специальные схемы подавления отпирающего импульса после выключения (наведённое напряжение со второго транзистора полумоста), конденсаторы увеличивающие входную ёмкость транзистора и т.д. Но все эти схемные решения встречаются относительно не часто, а если и встречаются, то почти всегда встроенными в управляющий драйвер, потому здесь о них речь идти не будет. В свою очередь, зарядный резистор и ограничитель – фактически обязательные элементы включения затвора транзистора. Более того, если даже в драйвере эти элементы присутствуют, но драйвер подключается к транзистору проводами, разрядный резистор и ограничитель дублируются.
Разрядный резистор представляет собой обычный маломощный резистор, любого типа, установленный между затвором и эмиттером (истоком). Его назначение – разряжать затвор, «подтягивать» затвор к эмиттеру при отсутствующем управлении с драйвера. Таким образом, при штатной работе преобразователя, когда все соединительные цепи исправны и все питания поданы, этот резистор не выполняет никакой полезной функции. Но когда драйвер ещё не включен (отсутствует его напряжение питания, а значит оба транзистора его оконечного усилителя закрыты), произошёл сбой питания управления, нарушена целостность управляющих проводников, т.е. когда выходное сопротивление драйвера велико, тогда резистор должен обеспечить закрытое состояние транзистора. И если разрядного резистора не будет (затвор «висит в воздухе»), то при наличии силового напряжения на коллекторе транзистор неизбежно откроется, что с большой вероятностью приведёт к появлению сквозного тока и выходу из строя преобразователя. Именно поэтому рекомендуется устанавливать резистор непосредственно на транзисторе: при такой установке в случае обрыва управляющих проводников (в т.ч. при мерцающем контакте) ключ просто перестанет работать, если же резистор установлен на драйвере, то в такой ситуации произойдёт выход из строя.
Номинал затворного резистора должен быть достаточен, чтобы погасить собственную утечку затвора, а это токи порядка долей мкА, т.е. сопротивление резистора может составлять десятки МОм, на практике же используют резисторы меньшего номинала, как правило 1…100 кОм. Резистор меньшего номинала уже существенно нагружает драйвер, а резистор большего номинала может не погасить импульс напряжения на выключении транзистора, если с драйвером произошла неисправность.
Ограничитель напряжения выполняет сходную функцию: защищает затвор от «лишнего» напряжения. Но ограничитель необходим в любой момент выключения транзистора, а порой и при включении (если индуктивность цепей управления недопустима велика), тем более необходим при нештатных ситуациях. Назначение ограничителя, по определению, ограничивать напряжение затвора. Допустимое напряжение затвора транзистора почти всегда +20 В, редко встречаются транзисторы с допустимым напряжением до +25 В, ещё реже с меньшим напряжением (кроме некоторых низковольтных MOSFET с «логическим управлением» и карбид-кремниевых транзисторов). При большем напряжении, в т.ч. пиковом, велика вероятность пробоя затвора напряжением. Хотя практически пробивное напряжение затвора составляет около 40 В, всё же рекомендуется ограничивать напряжение не более чем на 20 В. Потому ограничители напряжения, крайне желательно – двунаправленные, выбираются или на 18 В (чаще), или на 20 В (реже). При этом 18 В является оптимальным пробивным напряжением ограничителя: имеется и запас относительно напряжений управления и относительно максимального напряжения затвора. Ограничитель на 20 В применяется, как правило, при завышенном или нестабильном напряжении управления.
Тип ограничителя – серий «SMBJ», «КЕ» и т.п. Так же можно устанавливать вместо ограничителей обычные стабилитроны, что значительно упрощает поиск элемента для преобразователя с «приемкой 5». Стабилитрон в данной схеме ничем не уступает супрессору, т.к. быстродействие требуется относительно небольшое (скорость изменения напряжения в затворе даже в худшем случае не превышает 100 В/мкс) и рассеиваемая импульсная мощность не велика.
Ограничитель желательно устанавливать так же как и разрядный резистор: непосредственно на затворе транзистора (транзисторного модуля). При установке ограничителя даже на расстоянии нескольких см от затвора через провод, тем более через десятки см, в быстродействующих схемах можно считать, что ограничитель отсутствует, т.к. индуктивность проводов приведёт к тому, что в затворе будут импульсы практически сколь угодно большой амплитуды, а ограничитель так и будет стоять без дела. Потому и если ограничители установлены в драйвере, но драйвер расположен на расстоянии, необходимо этот ограничитель продублировать, по крайней мере если длительность фронтов управления менее 1 мкс. На практике у нас был случай, когда в изделии без видимых причин выходили из строя транзисторы инвертора, при этом пробивало именно затвор, защитные стабилитроны были установлены на плате управления (около 80 мм до кристаллов). Выходы из строя прекратились только после добавления в конструкцию дополнительной платы ограничителей, установленной на расстоянии около 10 мм от кристаллов транзисторов и без гибких проводников.
В общем, ограничитель на 18 В и резистор 1…10 кОм желательно ставить на каждом затворе и в непосредственной близости от затвора, какие бы дополнительный меры защиты от перенапряжения не применялись и как бы ни были продуманы алгоритмы подачи питаний преобразователя.
Данная статья, продолжаю затронутую в предыдущей части проблему включения силовой схемы транзистора, в достаточной степени проясняет основные принципы построения цепей управления транзистором. Выбор драйвера, затворного резистора, дополнительные элементы схемы управления – обо всём этом сказано, пусть и кратко, и во многом для типовых применений. Автор надеется, что эта статья, предыдущая часть, а так же статьи по теме снаббера и затворного резистора, являя собой единый описательный цикл, окажутся полезными разработчикам силовых транзисторных преобразователей. По крайней мере, как источник хоть какого-то, но опыта.