Стенд управляемой нагрузки
При разработке и изготовлении устройств управления трехфазными асинхронными электродвигателями возникает необходимость в проверке работоспособности данных устройств, при максимальной нагрузке. Для этой цели можно использовать резистивную нагрузку, но при этом проверка не будет полной ввиду отсутствия в нагрузке индуктивной и емкостной ячсоставляющей. Оптимальным испытанием будет использование в качестве нагрузки асинхронного электродвигателя необходимой мощности. Остается вопрос, каким образом нагрузить электродвигатель для получения максимального тока.
Предприятие АО «Электрум АВ» выпускает изделия, предназначенные для управления асинхронным электродвигателем такие как: МУАДМ (модуль управления асинхронным двигателем модернизированный), БРУТ (блок реверсивного управления тиристорный) и др. Руководством предприятия была поставлена задача: максимально приближенно к реальным условиям эксплуатации испытывать выпускаемые изделия. Так как качество и надежность выпускаемой продукции стоит первым пунктом задач современного предприятия. Самый простой способ решения этой задачи, купить нагрузочный стенд с необходимыми параметрами. Но это оказалось не так просто. Огромное количество предлагаемого оборудования не отвечало нашим требованиям. А требования такие, стенд нагрузки должен быть простым в эксплуатации и главное не дорогим. И специалисты предприятия АО «Электрум АВ» приступили к разработке стенда нагрузки.
Однозначно нагрузкой проверяемого изделия должен быть асинхронный электродвигатель, но как его нагружать? Можно двигатель механически соединить с генератором такой же мощности и по средствам изменения нагрузки генератора изменять тормозной момент для электродвигателя. Также вместо генератора можно использовать порошковую электромагнитную муфту. Электромагнитная муфта управляется от низкого напряжения, относительно малым током. Но необходимо периодически заменять магнитный парашек и после оглашения цены вопроса производителем желание в приобретении отпало.
Мы решили в качестве тормоза использовать асинхронный электродвигатель аналогичный двигателю нагрузки. Вот что из этого вышло.
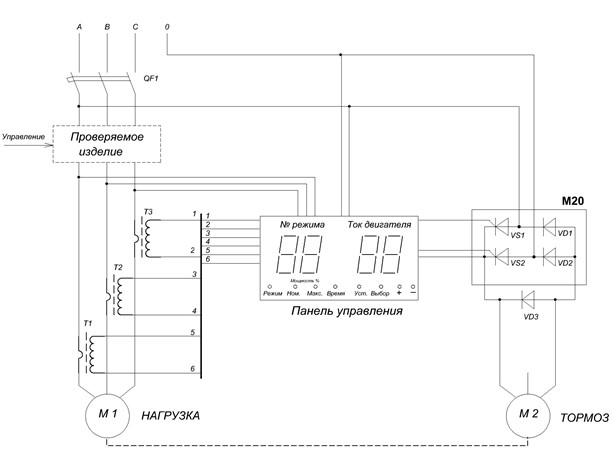
Рисунок 1 - Схема функциональная
Стенд состоит из двух асинхронных трехфазных электродвигателей механически соединенных между собой. Мощность электродвигателей выбирается в зависимости от необходимой нагрузки. Электродвигатель М1 подключается к выходу проверяемого изделия и является нагрузкой. Электродвигатель М2 является тормозом, величина тормозного момента прямо зависит от величины приложенного постоянного напряжения к обмоткам этого двигателя. В качестве управляемого выпрямителя применили свое выпускаемое изделие М20. Трансформаторы тока Т1-Т3 необходимы, для измерения тока по каждой фазе электродвигателя нагрузки. Применение в качестве тормоза электродвигателя, обусловлено возможностью управления характером и величиной нагрузки.
Стенд может работать в четырех режимах. Необходимый режим можно выбрать с пульта управления.
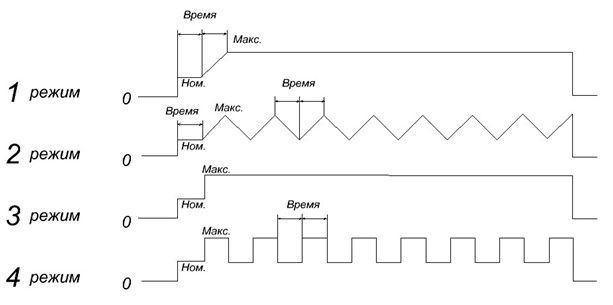
Рисунок 2 - Режимы работы
Режимы работы стенда между собой отличаются по характеру изменения тормозного момента. От плавного изменения момента, до быстрого нарастания и спада. Как видно из графиков рисунка 2 при использовании первого режима работы ток нагрузки при включении принимает номинальное значение, остается неизменным установленное время и после этого за период этого же времени плавно нарастает до установленного максимального значения и далее остается неизменным. Используя второй режим, ток нагрузки после достижения максимального значения плавно спадает до номинального значения и далее цикл повторяется. Режимы 3 и 4 наоборот отличаются от первых максимально быстрым изменением тока нагрузки. С пульта управления можно установить необходимые значения номинальной и максимальной нагрузки, а также время смены этих значений.
Работает стенд следующим образом.
Устанавливаем на стенд проверяемое изделие и замыкаем автоматический выключатель QF1. На проверяемое изделие подается питающее напряжение, на двигатель тормоза напряжение пока не подано. При включении проверяемого изделия на двигатель М1 подается напряжение, наличие которого контролируется блоком управления. При наличии напряжения хотя бы на одном из выходов проверяемого изделия, на управляемый выпрямитель двигателя тормоза начинают поступать сигналы управления в зависимости от выбранного режима, значения величин тока и времени. Ток нагрузки при работающем электродвигателе выводится на индикатор «ТОК ДВИГАТЕЛЯ», на индикаторе «№ РЕЖИМА» отображается номер выбранного режима управления.
На рис. 3 представлена принципиальная схема блока управления.
Блок управления выполнен на микроконтроллере ATMEGA 8535, на входы АЦП ADC0-ADC2 приходят сигналы с токовых трансформаторов, программа обсчитывает эти значения и на индикатор «ТОК ДВИГАТЕЛЯ» выводит среднее значение этих величин. На вход PA3 поступает сигнал синхронизации от питающей сети, для правильной работы управляемого выпрямителя. Выходное напряжение выпрямителя регулируется изменением угла отпирания тиристоров. Входы PA4-PA6 служат для контроля включения проверяемого изделия. Также как и предыдущий вход, эти входы имеют оптическую развязку. С выхода PB0 снимается сигнал управления управляемого выпрямителя. Здесь также используется серийно выпускаемое наше изделие трансформаторный тиристорный драйвер ДТТМ-Д3. Для надежного открытия тиристоров управляемого выпрямителя на них подается модулированный сигнал частотой 27 кГц. Входы PD0-PD7 используются для подключения кнопок пульта управления. Применение микроконтроллера обусловлено возможностью гибкого изменения режимов управления.
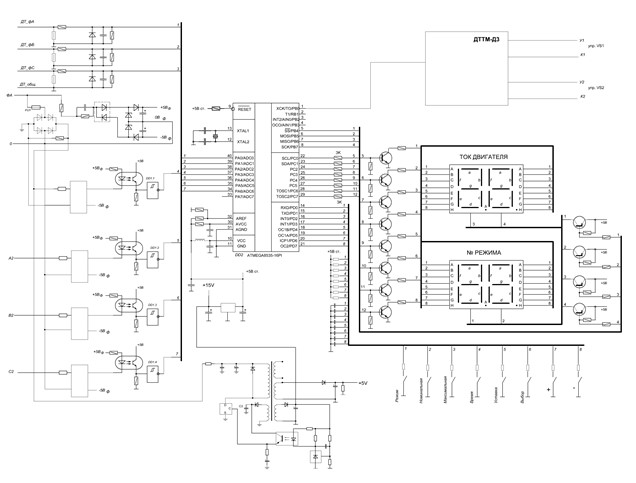
Рисунок 3 - Блок управления
На рисунке 4 изображена панель управления стендом. На ней расположены индикаторы, отображающие режим работы, установленные значения параметров и ток двигателя, а также кнопки управления и задания значений параметров и выбора необходимого режима управления. Ток нагрузки устанавливается косвенным способом через мощность. Если значение установленной мощности равна 50% ,это значит, на двигатель тормоза будет подано половина питающего напряжения. Какой при этом будет ток нагрузки, в начале мы не знаем. Составив таблицу соответствия и используя полученные значения в дальнейшем можно точно задавать необходимые значения номинального и максимального тока.

Рисунок 4 - Панель управления
После ввода стенда в эксплуатацию возникло желание изменить алгоритм управления. Можно задавать не мощность, а конкретное значение тока и наклон характеристики изменения. Но это работа на будущее, мысли по усовершенствованию будут всегда.
Предлагаемый Вашему вниманию стенд за время эксплуатации показал хорошие нагрузочные возможности. Используемый в качестве нагрузки двигатель мощностью 3 кВт. при подводимой мощности к тормозящему двигателю в 80% был нагружен до 120% от номинальной мощности. Серийно выпускаемые нагрузочные стенды стоят дорого и не всегда целесообразно тратить деньги на то, что можно сделать самим. Изменив управляющую программу стенд нагрузки можно приспособить для решения различных задач связанных с диагностикой и испытанием силового оборудования.