Малогабаритные интеллектуальные инверторы специального назначения
Малогабаритные интеллектуальные инверторы специального назначения производства «Электрум АВ»: развитие и номенклатура.
Низковольтные следящие приводы – одно из наиболее востребованных направлений силовой электроники среди изделий специального назначения. Различного рода системы наведения, закрылки ракет и БЛА, стабилизированные платформы и т.д. Всё это требует следящих приводов, как правило на основе коллекторного или вентильного двигателя. А к двигателю необходим управляющий инвертор. О развитии и актуальной номенклатуре данных инверторов и пойдёт речь ниже.
Особенностью следящих приводов, по определению, является частая смена направлений вращения вала двигателя. В отдельных изделиях частота реверсов может доходить до 100 Гц. При этом, как правило, предъявляются жёсткие требования к скорости реверса конечного изделия, а значит задача ограничения пусковых токов – далеко не первая для разработчика такого привода. Инверторы вынуждены работать в жёстких условиях больших токов, зачастую неограниченных внешними схемами защит, при наличии мощных индуктивных выбросов при реверсировании, в условиях повышенного силового напряжения при переходе электродвигателя в генераторный режим. Всё это заставляет применять специальные схемные решения и вводить специальные узлы защит в интеллектуальные инверторы для таких приводов. Но с другой стороны, т.к. привод следящий, то он, почти аксиома, быстродействующий. А значит модуль (интеллектуальный инвертор) должен как можно меньше влиять на процесс управления, позволяя развиваться и большим пусковым токам, и не допускать длительной блокировки при превышении током порога защиты. Эти два полюса формировали все поколения интеллектуальных инверторов специального назначения.
Первым модулем в данной области был 5УМ14Б (см. рисунки 1 и 2). Модуль представляет собой трёхфазный инвертор со схемой управления, включающей в себя схемы защиты по среднему току и по импульсному току. Предусмотрена отдельная схема контроля тока инвертора внешней схемой управления. В состав модуля так же входит DC/DC-преобразователь. В первой версии так же была защита по температуре.
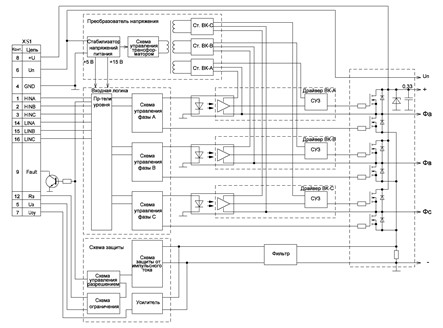
Рисунок 1 – Структурная схема 5УМ14Б

Рисунок 2 – Внешний вид 5УМ14Б
Таким образом, модуль являлся функционально законченным изделием, позволял применение без дополнительных внешних схем защит, но имел недостаток в конструктиве. Насыщенность схемы управления требовала размещения нескольких плат одна над другой (при сильно ограниченной площади основания), что негативно сказывалось на виброустойчивости. Для повышения виброустройчивости, в свою очередь, было необходимо применение множества конструктивных решений, которые никак не способствовали повышению технологичности изделия.
С другой стороны, защиты модуля потребителю скорее мешали. Температурная защита была исключена почти сразу, т.к. для изделий специального назначения гораздо более критично выполнить задачу, нежели сохранить работоспособность. А защита по среднему току, хотя и надёжно защищала модуль и нагрузку, не позволяла развиться большим пусковым токам, что негативно сказывалось на быстродействии привода. В итоге, модуль оказался удачным для относительно небыстродействующих приводов с простой схемой управления, но не был «гибким» в применении, плюс к этому был не технологичен.
В результате второй версией низковольтного интеллектуального инвертора стал 5УМ14А (см. рисунки 3 и 4). Была исключена защита по среднему току, упрощены схемы формирования «мёртвого» времени, т.к., как показала практика, при наличии обратных связей стабильность этого параметра совершенно не критична, упрощён DC/DC-преобразователь. Всё это позволило разместить схему управления модуля на одной внутренней плате, что помимо снижения габаритных размеров так же значительно повысило виброустойчивость и, как следствие, технологичность. Из защит осталась только защита по импульсному току, которая была перенастроена на большую блокировку, минимизирующую нагрев транзисторов при работе в нештатных ситуациях (заклиненный вал двигателя, выход из строя обмотки и т.п.).
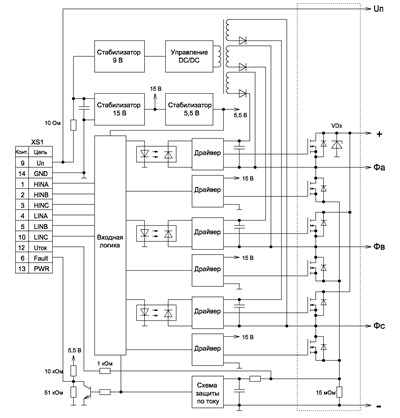
Рисунок 3 – Структурная схема 5УМ14А

Рисунок 4 – Внешний вид 5УМ14А
Из опыта эксплуатации 5УМ14А были сделаны ряд выводов, как по модулям интеллектуальных инверторов в частности, так и по следящим приводам в целом.
В части схемы и функций:
Зачастую собственно защиты модуля разработчику конечного изделия не нужны. Если схема разработана корректно, то в них почти нет необходимости, а если некорректно, то одной защиты по импульсному току всё равно не достаточно для исключения выходов из строя. Введение же дополнительных защит разработчику мешает; контроль и ограничение тока если и производятся, то только внешней схемой управления, не желательно влияние модуля на контуры обратных связей и быстродействие привода.
Из защит инвертора необходима только простейшая защита по перенапряжению (супрессор и, по возможности, снабберный конденсатор).
С другой стороны, оказалась желательна защита от пониженного напряжения питания схемы управления, т.к. алгоритмы подачи и снятия питания не разрабатываются почти никогда. Тем более не ставятся защиты от подачи сигналов управления до завершения переходных процессов установления питаний.
Плюс к этому, относительно сложный и занимающей на плате управления много места DC/DC-преобразователь, оказывается фактически не нужным. Для вентильного двигателя более чем достаточно бутстрепного питания верхних ключей; для такого применения DC/DC-преобразователь избыточен. А коллекторные щёточные двигатели в современных разработках используются всё меньше и меньше.
В части элементной базы, благодаря новым разработкам микросхем специального назначения, так же напрашивались изменения. В первом модуле – 5УМ14Б, для гальванической развязки управления драйверами верхних ключей использовался оптрон 249ЛП8. Недостатки – относительно большой ток потребления (как по управлению, так и выходной схемой) и относительно низкая устойчивость du/dt. Для исключения этих недостатков в последующем модуле 5УМ14А использовался оптрон 3ОД120, практически не имеющий в этом смысле недостатков, но требующий внешнего драйвера для умощнения управляющего сигнала. Уже позже появилась м/с 1308ЕУ3, которая требовала минимум обвязки в схеме и как нельзя лучше подходила для низковольтного интеллектуального инвертора.
В части конструктива, для повышения виброустойчивости и технологичности, не допускалась установка более чем одной управляющей платы, требовалась минимальная высота, а потребитель требовал минимальных габаритов в целом.
В результате третьей версией низковольтных интеллектуальных инверторов стал 5М31МА (см. рисунки 5 и 6), включивший в себя все вышеуказанные выводы.
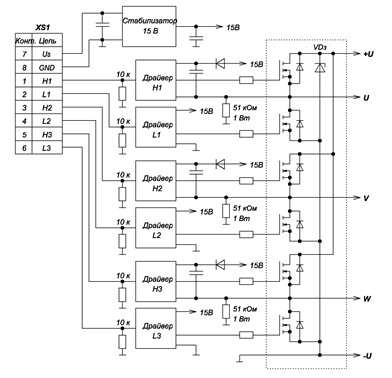
Рисунок 5 – Структурная схема 5М31МА

Рисунок 6 – Внешний вид 5М31МА
Модуль отличается очень малыми габаритными размерами, не имеет в своём составе никаких защит по току и напряжению (кроме одиночного супрессора на силовых выводах питания инвертора), не формирует «мёртвое» время, но зато обладает защитой от пониженного напряжения питания схемы управления. Так же в модуле отсутствует полноценный DC/DC-преобразователь; организовано бутстрепное питание верхних ключей с активной «подтяжкой» фаз к общему. Как следствие, модуль стал очень простым, технологичным, «гибким» в применении, позволяющим работать при значительных (недлительных) перегрузках.
Итогом развития стали три модуля, одинаковых в части назначения и силовой схемы, но отличающихся функционалом и конструктивом. Сравнение данных модулей приведено в таблице 1.
Таблица 1 – Сравнение низковольтных инверторов специального назначения
|
|
5УМ14Б |
5УМ14А |
5М31МА |
|
Максимальный ток инвертора, А |
20 |
20 |
20 |
|
Максимальное коммутируемое напряжение, В |
|
120 |
130 |
|
Габаритные размеры, мм |
95х37х35 |
77х33х22 |
70х29х20 |
|
|
|
|
|
|
Встроенный DC/DC-преобразователь |
+ |
+ |
|
|
Формирование «мёртвого» времени |
+ |
+ |
|
|
Защита по импульсному току |
+ |
+ |
|
|
Защита по среднему току |
+ |
|
|
|
Защита по пиковому напряжению |
+ |
+ |
+ |
Примечательно в развитии интеллектуальных инверторов специального назначения то, что со временем схема и конструкция не усложнялись, а наоборот – упрощались. Обычно, это снижает потребительские свойства изделия, но не здесь. Как показал опыт, для следящего привода чем модуль проще, чем меньше он «влезает» в контур управление, тем лучше. И чем проще конструктив, тем проще пройти испытания. В этом смысле оптимален 5М31МА. С другой стороны, конечно, зачастую разработчику требуется не столько быстродействие, сколько надёжность и/или простота собственной схемы управления, тогда оптимальный вариант находится на другом полюсе – 5УМ14Б. Ну и где-то посредине – 5УМ13А. Так оно развивалось, а что выбрать сегодня, как обычно, решает только разработчик.